Skákavý robot: Malý, ale šikovný
Sdílet na sociálních sítích:
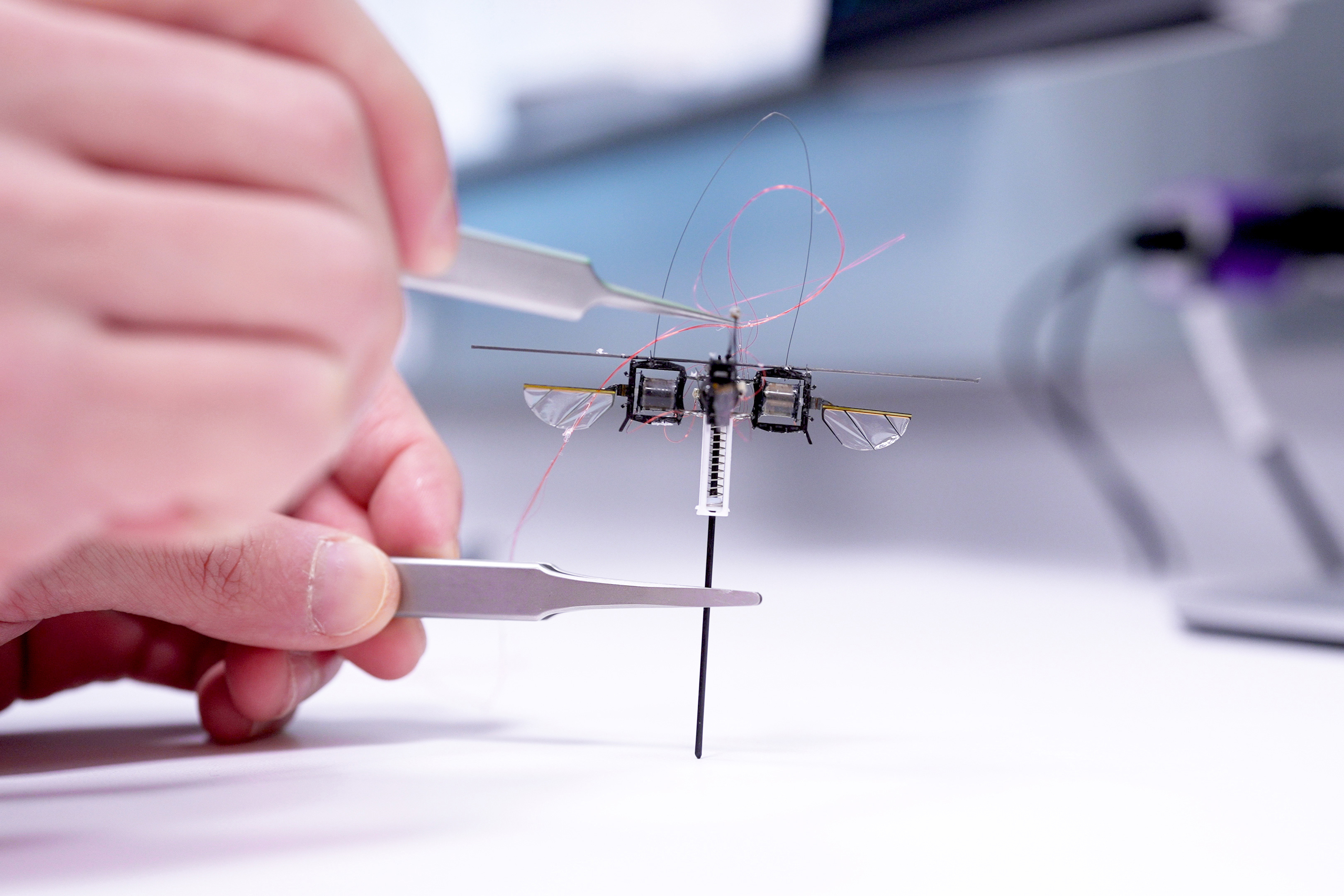
Miniaturní robot velikosti hmyzu s pružnou nohou dokáže překonávat překážky a nést těžké břemeno.
Roboti v měřítku hmyzu se dokáží dostat na místa, kam se větší stroje nedostanou, například do zřícených budov při záchranných akcích po zemětřesení. Při pohybu mezi troskami se však miniaturní roboti pohybující se plazením mohou setkat s vysokými překážkami, které nedokážou překonat, nebo se skloněnými plochami, po kterých se budou klouzat. Letečtí roboti by se těmto nebezpečí mohli vyhnout, ale množství energie potřebné k letu by značně omezilo, jak daleko se robot může do zříceniny dostat, než se bude muset vrátit na základnu a dobít.
Aby se dosáhlo nejlepšího využití obou způsobů pohybu, vyvinuli výzkumníci z MIT skákavého robota, který dokáže přeskakovat vysoké překážky a přeskakovat šikmé nebo nerovné povrchy a přitom spotřebovává mnohem méně energie než letecký robot.
Skákavý robot, menší než lidský palec a vážící méně než kancelářská sponka, má pružnou nohu, která ho vystřelí do vzduchu, a čtyři moduly s klapkami, které mu poskytují vztlak a kontrolu nad orientací.
Robot dokáže skočit asi 20 centimetrů do vzduchu, což je čtyřnásobek jeho výšky, při boční rychlosti asi 30 centimetrů za sekundu, a bez problémů přeskakuje led, mokré povrchy a nerovnou půdu, nebo dokonce na vznášející se dron. Přitom skákavý robot spotřebovává asi o 60 % méně energie než jeho létající protějšek.
Díky své nízké hmotnosti a odolnosti a energetické účinnosti skákavého procesu by robot mohl nést asi desetkrát větší užitečné zatížení než podobně velký letecký robot, což otevírá dveře mnoha novým aplikacím.
„S skákavým robotem je mnohem snazší umístit na palubu baterie, obvody a senzory než s létajícím robotem. Doufáme, že se tento robot jednou dostane z laboratoře a bude užitečný v reálných scénářích,“ říká Yi-Hsuan (Nemo) Hsiao, absolvent MIT a spoluautor článku o skákavém robotovi. Výzkum vyšel dnes v časopise Science Advances.
Maximalizace účinnosti
Skákání je běžné u hmyzu, od blech, které skáčou na nové hostitele, až po kobylky, které se pohybují po louce. Ačkoli skákání je u robotů v měřítku hmyzu, které se obvykle pohybují létáním nebo plazením, méně časté, skákání nabízí mnoho výhod pro energetickou účinnost.
Když robot skočí, přemění potenciální energii, která pochází z jeho výšky nad zemí, na kinetickou energii, když padá. Tato kinetická energie se přemění zpět na potenciální energii, když dopadne na zem, a pak zpět na kinetickou, když se zvedne, a tak dále.
Pro maximalizaci účinnosti tohoto procesu je MIT robot vybaven elastickou nohou vyrobenou z tlačné pružiny, která je podobná pružině v propisce s klikacím uzávěrem. Tato pružina přemění rychlost robota směrem dolů na rychlost směrem nahoru, když dopadne na zem.
„Pokud máte ideální pružinu, váš robot může prostě skákat bez ztráty energie. Ale protože naše pružina není úplně ideální, používáme klopné moduly k kompenzaci malého množství energie, které ztratí při kontaktu se zemí,“ vysvětluje Hsiao.
Když se robot odrazí zpět do vzduchu, klopná křídla poskytují vztlak a zároveň zajišťují, aby robot zůstal vzpřímený a měl správnou orientaci pro svůj další skok. Jeho čtyři klopné mechanismy jsou poháněny měkkými aktuátory neboli uměle svaly, které jsou dostatečně odolné, aby vydržely opakované nárazy na zem, aniž by se poškodily.
„Používáme stejného robota pro celou tuto sérii experimentů a nikdy jsme ho nemuseli zastavit a opravovat,“ dodává Hsiao.
Klíčem k výkonu robota je rychlý řídicí mechanismus, který určuje, jak by měl být robot orientován pro svůj další skok. Snímání se provádí pomocí externího systému sledování pohybu a pozorovací algoritmus počítá nezbytné řídicí informace pomocí měření senzorů.
Když robot skáče, následuje balistickou trajektorii a opisuje oblouk ve vzduchu. Na vrcholu této trajektorie odhaduje své místo přistání. Pak na základě cílového místa přistání regulátor vypočítá požadovanou počáteční rychlost pro další skok. Během letu robot klapá křídly, aby upravil svou orientaci tak, aby dopadl na zem se správným úhlem a osou, aby se pohyboval správným směrem a správnou rychlostí.
Odolnost a flexibilita
Výzkumníci podrobili skákavého robota a jeho řídicí mechanismus testům na různých površích, včetně trávy, ledu, mokrého skla a nerovné půdy – úspěšně prošel všemi povrchy. Robot dokázal skákat i na dynamicky naklápějícím se povrchu.
„Robota vlastně nezajímá úhel povrchu, na který dopadá. Dokud se při dopadu na zem neprokluzuje, bude v pořádku,“ říká Hsiao.
Protože regulátor zvládá různé terény, robot může snadno přecházet z jednoho povrchu na druhý bez ztráty rytmu.
Například skákání přes trávu vyžaduje větší tah než skákání přes sklo, protože listy trávy způsobují tlumení, které snižuje výšku skoku. Regulátor může během letové fáze dodat do křídel robota více energie, aby to kompenzoval.
Díky malé velikosti a nízké hmotnosti má robot ještě menší moment setrvačnosti, díky čemuž je obratnější než větší robot a lépe odolává srážkám.
Výzkumníci předvedli jeho obratnost demonstrací akrobatických salto. Peříčko lehký robot dokázal skočit i na létající dron, aniž by poškodil některé z obou zařízení, což by mohlo být užitečné při kooperativních úlohách.
Navíc, zatímco tým předvedl skákavého robota, který nesl dvojnásobek své hmotnosti, maximální užitečné zatížení může být mnohem vyšší. Přidání větší hmotnosti neškodí účinnosti robota. Spíše účinnost pružiny je nejdůležitějším faktorem, který omezuje, kolik robot může nést.
V budoucnu plánují výzkumníci využít jeho schopnost nést těžká břemena instalací baterií, senzorů a dalších obvodů na robota v naději, že mu to umožní autonomně skákat mimo laboratoř.
„Multimodální roboti (ti, kteří kombinují více strategií pohybu) jsou obecně nároční a zvláště působiví v tak malém měřítku. Všestrannost tohoto malého multimodálního robota – převracení, skákání na drsném nebo pohyblivém terénu a dokonce i na jiném robotovi – ho činí ještě působivějším,“ říká Justin Yim, docent na Univerzitě v Illinois v Urbana-Champagne, který se na této práci nepodílel. „Kontinuální skákání, které je ukázáno v tomto výzkumu, umožňuje obratný a efektivní pohyb v prostředích s mnoha velkými překážkami.“
Tento výzkum je částečně financován Národní vědeckou nadací USA a programem MIT MISTI. Chirarattananon byl podporován Radou pro výzkumné granty Hongkongské zvláštní administrativní oblasti Číny. Hsiao je podporován stipendiem MathWorks a Kim je podporován stipendiem Zakhartchenko.
Související články
5 důležitých pojmů pro ochranu soukromí na mobilu
MIT Lincoln Laboratory: Hlavní opora národní bezpečnosti USA
První průmyslový super-humanoidní robot na světě poháněný umělou inteligencí
Sdílet na sociálních sítích:
Komentáře