Flexibilní robot pomáhá záchranářům při prohledávání sutin
Sdílet na sociálních sítích:
Nový robot SPROUT se dokáže proplétat sutinami a pomáhá záchranářům při vyhledávání osob po katastrofách.
Při velkých katastrofách, kdy dochází k sesuvům půdy a zhroucení staveb, se lidé mohou ocitnout uvězněni pod troskami. Vyprošťování obětí z těchto nebezpečných prostředí může být nebezpečné a fyzicky vyčerpávající. Aby se záchranným týmům usnadnilo prohledávání těchto struktur, vyvinula laboratoř MIT Lincoln ve spolupráci s výzkumníky z University of Notre Dame robota Soft Pathfinding Robotic Observation Unit (SPROUT).
SPROUT je robotický systém podobný vinné révě – měkký robot, který se dokáže proplétat mezi překážkami a malými prostory. Záchranáři mohou SPROUT nasadit pod zřícené struktury, aby prozkoumaly okolí, vytvořily mapu a našly optimální cesty pro průnik přes trosky.
„Prostředí urbánního vyhledávání a záchrany může být kruté a neúprosné, kde i ta nejodolnější technologie bojuje o provozuschopnost. Základní princip fungování robota typu vinná réva zmírňuje mnoho problémů, kterým čelí jiné platformy,“ říká Chad Council, člen týmu SPROUT, vedený Nathanielem Hansonem. Program je realizován v rámci skupiny Human Resilience Technology Group laboratoře.
Záchranáři pravidelně integrují technologie, jako jsou kamery a senzory, do svých pracovních postupů, aby pochopili složitá operační prostředí. Mnohé z těchto technologií však mají omezení. Například kamery speciálně vyrobené pro operace vyhledávání a záchrany mohou prozkoumávat pouze přímou trasu uvnitř zřícené struktury. Pokud chce tým prohledat dále, musí vyříznout přístupový otvor, aby se dostal do další oblasti prostoru. Roboti jsou dobří pro průzkum na vrcholu hald sutin, ale nejsou vhodní pro vyhledávání v úzkých, nestabilních strukturách a jejich oprava v případě poškození je drahá. Výzva, kterou SPROUT řeší, spočívá v tom, jak se dostat pod zřícené konstrukce pomocí levného, snadno ovladatelného robota, který může nést kamery a senzory a procházet klikatými cestami.
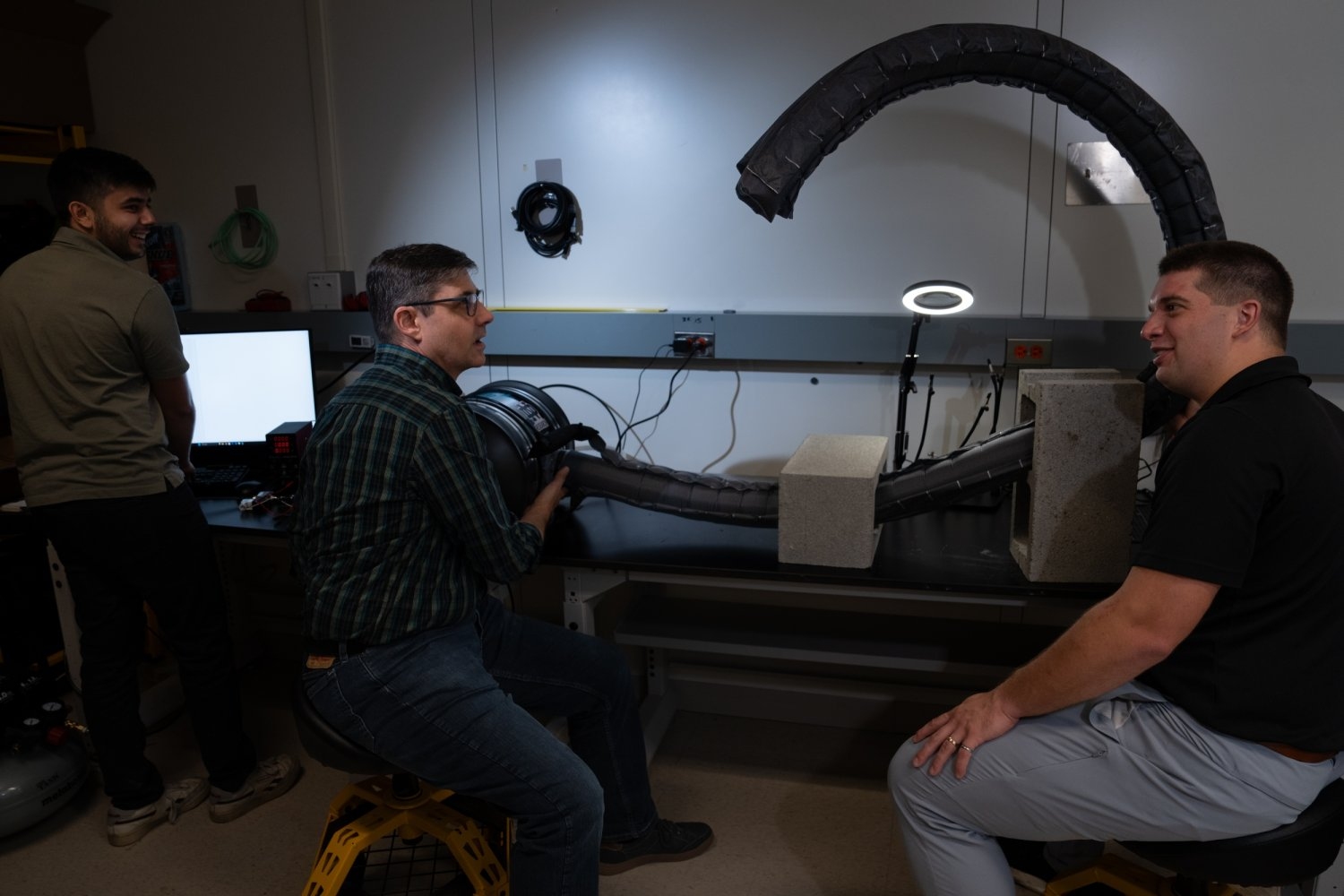
SPROUT se skládá z nafukovací trubice vyrobené ze vzduchotěsné tkaniny, která se odvíjí z pevné základny. Trubice se nafoukne vzduchem a motor řídí její nasazení. Když se trubice rozvine do sutin, může se ohýbat kolem rohů a proplétat se úzkými průchody. Kamera a další senzory namontované na špičce trubice snímají a mapují prostředí, ve kterém se robot pohybuje. Operátor řídí SPROUT joysticky a sleduje obrazovku, která zobrazuje videozáznam z kamery robota. V současné době se SPROUT může nasadit až do vzdálenosti 10 stop a tým pracuje na rozšíření na 25 stop.
Při konstrukci SPROUT tým překonal řadu výzev souvisejících s flexibilitou robota. Protože robot je vyroben z deformovatelného materiálu, který se ohýbá v mnoha bodech, je obtížné určit a řídit tvar robota, když se rozvíjí prostředím – představte si, že se snažíte ovládat rozšiřující se vlnící hračku na kropení. Nezbytné pro přijetí systému záchranáři bylo přesné určení způsobu aplikace tlaku vzduchu uvnitř robota tak, aby řízení bylo tak jednoduché, jako namířit joystick dopředu, aby se robot posunul dopředu. Kromě toho musel tým navrhnout trubici tak, aby se minimalizovalo tření, zatímco se robot rozvíjí, a navrhnout ovládací prvky pro řízení.
Teleoperovaný systém je dobrým výchozím bodem pro posouzení nebezpečí prázdných prostor, tým však také hledá nové způsoby, jak aplikovat robotické technologie do této oblasti, například pomocí dat zachycených robotem k vytváření map podpovrchových prázdných prostor. „Kolapsy jsou vzácné, ale devastující události. V robotice bychom obvykle chtěli měření skutečných hodnot k ověření našich přístupů, ale pro zřícené struktury jednoduše neexistují,“ říká Hanson. Hanson a jeho tým proto vytvořili simulátor, který jim umožňuje vytvářet realistické zobrazení zřícených staveb a vyvíjet algoritmy, které mapují prázdné prostory.
SPROUT byl vyvinut ve spolupráci s Margaret Coad, profesorkou na University of Notre Dame a absolventkou MIT. Při hledání spolupracovníků již Hanson – absolvent Notre Dame – znal práci Coadové na robotech typu vinná réva pro průmyslovou inspekci. Odborné znalosti Coadové, zkušenosti laboratoře v oblasti inženýrství, silné partnerství s týmy pro vyhledávání a záchranu ve městech a schopnost vyvíjet základní technologie a připravovat je pro přechod do průmyslu „z toho udělaly opravdu přirozené spojení, abychom spojili síly a pracovali na výzkumu pro tradičně zanedbávanou komunitu,“ říká Hanson. „Jako jedna z hlavních vynálezkyň robotů typu vinná réva přináší profesorka Coad neocenitelné zkušenosti s výrobou a modelováním těchto robotů.“
Laboratoř Lincoln testovala SPROUT se záchranáři na cvičišti Massachusetts Task Force 1 v Beverly v Massachusetts. Testy umožnily výzkumníkům zlepšit odolnost a přenositelnost robota a naučit se, jak robota efektivněji rozvíjet a řídit. Tým plánuje větší terénní studii na jaře.
„Týmy pro vyhledávání a záchranu ve městech a záchranáři hrají ve svých komunitách klíčovou roli, ale obvykle nemají rozpočty na výzkum a vývoj,“ říká Hanson. „Tento program nám umožnil posunout úroveň připravenosti technologie robotů typu vinná réva do bodu, kdy se záchranáři mohou zapojit do praktické ukázky systému.“
Snímání v omezených prostorech není problém unikátní pro komunity reagující na katastrofy, dodává Hanson. Tým si představuje, že technologie bude použita při údržbě vojenských systémů nebo kritické infrastruktury s těžko přístupnými místy.
Počáteční program se zaměřil na mapování prázdných prostor, budoucí práce však směřují k lokalizaci nebezpečí a posouzení životaschopnosti a bezpečnosti operací přes trosky. „Mechanický výkon robotů má bezprostřední vliv, ale skutečným cílem je přehodnotit způsob, jakým se senzory používají ke zlepšení povědomí o situaci pro záchranné týmy,“ říká Hanson. „V konečném důsledku chceme, aby SPROUT poskytoval týmům kompletní operační obrázek dříve, než kdokoli vstoupí na haldu sutin.“
Související články
Malware ClickFix: Podvodná CAPTCHA krade hesla
Cem Tasan novým ředitelem Materiálové výzkumné laboratoře MIT
Čínský robot Tron 1 zdolává překážky s lehkostí
Sdílet na sociálních sítích:
Komentáře